智能驾驶技术涉及到多个传感器和计算机视觉算法,如果这些技术被黑客攻击或出现故障,会对车辆和乘客的安全带来风险,如果智能汽车普及,那么影响是灾难性的?其实,大家不用太过担心。
汽车智能驾驶的技术安全性涉及很多方面,一方面,我们需要的是一套稳定执行的系统;另外一方面,我们的大脑不能被黑客控制。具体来讲,就是汽车领域的两个专业方向:功能安全专业+信息安全专业。这是两大块的东西,有很多很深的内容。
下面分开来讲解一下,先说:信息安全
信息安全这东西吧,理论上的危险的确是有的,历史上也发生过。不过就当下来讲,大家别太担心,因为国家给你想着呢。
黑客攻击汽车,大家觉得很神秘。这里可以通过一次十年前的著名汽车攻击事件,窥见其一二。2015年美国两名黑客大佬在“黑客大会”上展示的对特莱斯科的攻击。随后,他们发布了详达百页的技术资料。
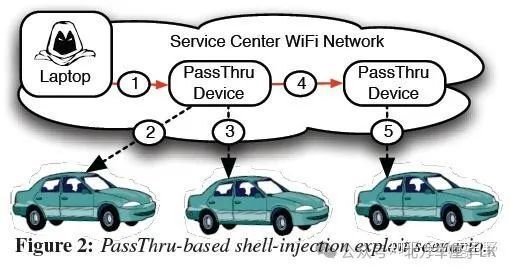
2015年7月,两名美国白帽黑客Chris Valasek和Charlie Miller成功侵入一辆正在行驶的JEEP自由光SUV的CAN总线网络系统,向发动机、变速箱、制动和转向等系统发送错误指令,最终使这辆车开翻到马路边的斜坡下。随后,他们在8月全球最大的黑客大会上,发布了攻击细节。该事件直接导致了克莱斯勒公司召回了140多万辆汽车,而且该事件也是首起因汽车信息安全问题引发的汽车召回。
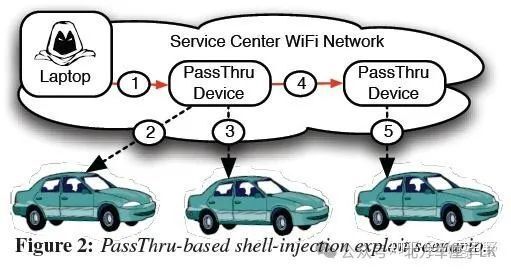
黑客攻击汽车步骤:
·单车分析:PCB拆解分析,接入(WIFI/4G等)、系统root权限获取、系统固件篡改
·批量复制:远程扫描、渗透提权、远程更新、远程控车
1.他们购买了汽车,对汽车的娱乐系统进行拆解分析,提取权限,完成对ECU的root固件篡改。
2.由于他们本身就是资深黑客,在暗网购买到了移动公司基站漏洞。通过移动公司的网络端的基站漏洞,批量获取了车辆信息,攻击的云端平台。
3.最终他们通过单车和云端平台的结果,完成了批量的汽车攻击。
整个过程长达2年,在这个过程中得到了各种资助达几十万美元。才最终完成了对车辆的攻击。
为什么说这次事件是最著名的?
Chalie Miller和Chris Valasek作为黑客突破了以往汽车网络安全黑客的极限,那就是成功实现了“非物理接触下的远程进行车辆控制”。以往的黑客只能通过物理接触,或者只能控制单个车辆,最多进行近距离攻击,而Chalie和Chris可以控制全美范围内,几乎所有安装了Uconnect车机的车。
但是别怕,这样的事件仅仅是初期的问题。现如今国家已经预防得很全面了,这里最重要的就是,汽车信息安全最重要的就是强制性标准:GB 44495-2024《汽车整车信息安全技术要求》。该标准详细规定了汽车信息安全管理体系的要求、信息安全的一般要求、信息安全的技术要求、检查试验方法以及同一型式的判定。这里不做赘述了,要想详细了解,可以自己下载下来看看。
结论就是,国家组织了一批国内的大佬,编写了一套适合我们的标准,来规范和保护我们汽车的信息安全。这些大佬弄出来的东西,不可能轻易被黑客攻破。所以我们大可不用担心。
然后再说说功能安全
功能安全也是一个专业的学科,有很多书籍可以看。当然最重要的就是依据ISO 26262进行开发。ISO 26262是国际通用的汽车功能安全标准,旨在降低电子电气系统故障导致的安全风险,适用于总重不超过3.5吨的乘用车。其核心内容可概括为以下几点:
1.安全生命周期管理:覆盖汽车电子系统从概念设计、开发、生产到报废的全生命周期,要求通过危害分析与风险评估(HARA)确定安全目标,并建立系统化的安全流程。
2.ASIL安全等级划分:将安全完整性分为四个等级(ASIL A-D),其中ASIL D为最高级别,需满足最严格的安全要求和风险管理措施。例如,涉及车辆动力控制、制动等关键系统通常需达到ASIL D等级。
3.技术要求:硬件层面,需评估随机硬件失效概率,并设计故障检测与容错机制。软件层面,要求遵循安全编码规范,实施静态分析、动态测试等验证手段。
4.认证意义:ISO 26262认证是汽车电子零部件供应商的准入门槛之一,通过认证表明企业具备符合国际标准的安全开发能力,有助于提升产品可靠性和市场竞争力。
作为整车成面,如何去做功能安全呢?答案:冗余!说白了就是一套不行,再来一套。理论也很简单:比如一套系统的失效概率是1%,那么再增加一套干同样的事情,那么两套系统同时失效的概率就是1%×1%=0.1‰,这就是一个很低的概率了。
对于自动驾驶来讲,我们主要提供六大冗余系统:
1. 电源冗余:比如双电源供应、双回路的“双保险”设计。
2. 通信冗余:任一通讯系统发生故障时,能够实现通讯热切换。比如:双接两路制动、转向、动力的线控通讯链路。
3. 控制冗余:所谓控制冗余,是说自动驾驶系统采用了两个高性能智能驾驶计算平台,支持单计算平台故障后的热切换安全机制,实现双控。
4. 制动冗余:比如博世的ESP+iBooster组合,也有企业在这两种控制的基础上,额外增加第三重机械冗余,实现机械冗余+双电子冗余的“三重制动冗余解决方案”。
5. 转向冗余:现在汽车都转向都采用电子助力转向系统(EPS)。比如转向冗余可采用:EPS硬件双CPU、双桥驱动、双绕组电机,任意单一回路故障,可提供至少50%转向助力
6. 感知冗余:自动驾驶汽车的感知方案主要有两种,一种是的纯视觉方案,另外一种就是国内车企的融合方案。包括激光雷达、高清摄像头、毫米波雷达、高清环视摄像头以及超声波传感器等。这些传感器的融合,极大避免单一种类传感器的弊端,提高安全性。